| Утвержден и введен в действие Приказом Ростехрегулирования от 28 февраля 2008 г. N 22-ст НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ БЕЗОПАСНОСТЬ МАШИН ФИЗИЧЕСКИЕ ВОЗМОЖНОСТИ ЧЕЛОВЕКА ЧАСТЬ 1 ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ EN 1005-1:2001 Safety
of machinery. Human physical performance. Part
1. Terms and
definitions (IDT) ГОСТ Р ЕН 1005-1-2008 Группа Г07 ОКС 01.040.13 13.110 13.180 Дата введения 1 января 2009 года Предисловие Цели и принципы стандартизации в
Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N
184-ФЗ "О техническом регулировании", а правила применения
национальных стандартов Российской Федерации - ГОСТ Р
1.0-2004 "Стандартизация в Российской Федерации. Основные положения". Сведения о
стандарте 1. Подготовлен
"Всероссийским научно-исследовательским институтом стандартизации и
сертификации в машиностроении" (ФГУП "ВНИИНМАШ") и
Экспериментальным научно-исследовательским институтом металлорежущих станков
(ОАО "ЭНИМС") на основе собственного аутентичного перевода стандарта,
указанного в пункте 4. 2. Внесен
Техническим комитетом по стандартизации ТК 70 "Станки". 3. Утвержден и введен в действие Приказом
Федерального агентства по техническому регулированию и метрологии от 28 февраля
2008 г. N 22-ст. 4. Настоящий стандарт идентичен
европейскому стандарту ЕН 1005-1:2001 "Безопасность машин. Физические
возможности человека. Часть 1. Термины и определения"
(EN 1005-1:2001 "Safety of
machinery. Human physical performance. Part 1. Terms and definitions"). При применении настоящего стандарта
рекомендуется использовать вместо европейских стандартов соответствующие
национальные стандарты Российской Федерации, приведенные в Приложении A. 5. Введен впервые. Информация об изменениях к настоящему
стандарту публикуется в ежегодно издаваемом информационном указателе
"Национальные стандарты", а текст изменений и поправок - в ежемесячно
издаваемых информационных указателях "Национальные стандарты". В
случае пересмотра (замены) или отмены настоящего стандарта соответствующее
уведомление будет опубликовано в ежемесячно издаваемом информационном указателе
"Национальные стандарты". Соответствующая информация, уведомление и
тексты размещаются также в информационной системе общего пользования - на
официальном сайте Федерального агентства по техническому регулированию и
метрологии в сети Интернет. Введение Рабочие системы, выполненные в
соответствии с требованиями эргономики, повышают безопасность,
производительность и эффективность труда, улучшают условия работы и жизни
человека, противодействуют отрицательному воздействию на здоровье и
трудоспособность человека. Конструкция машины, отвечающая
требованиям эргономики, оказывает благоприятное влияние на рабочую систему и на
надежность функционирования человека внутри этой системы. Настоящий стандарт - один из многих
эргономических стандартов по безопасности машин, устанавливающих принципы,
которых должны придерживаться конструкторы и изготовители, чтобы выполнять
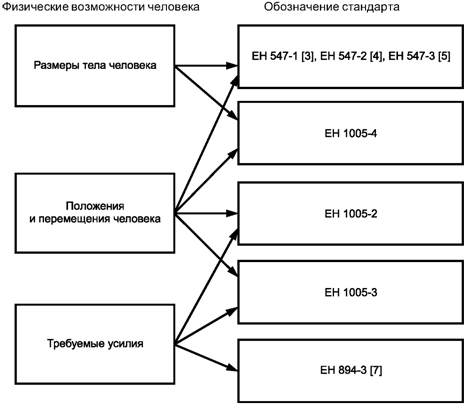
требования эргономики. Серия стандартов ЕН 1005 состоит из пяти
стандартов, в которых рассматривается зависимость работоспособности человека от
конструкции машины. В разделе "Область применения" каждого из этих
документов определены границы его применения. Рисунок 1 иллюстрирует отражение в
стандартах различных аспектов физических возможностей человека.
Рисунок 1. Отражение в стандартах физических возможностей человека ЕН 1005-2, ЕН 1005-3, ЕН 1005-4 посвящены общей оценке риска. Процедуры оценки риска в
каждом стандарте имеют свои особенности. Исследования физической нагрузки человека
при ручном управлении или обслуживании машины базируются на методах и
технических приемах, которые были разработаны различными научными дисциплинами
(например, эпидемиологией, биомеханикой, физиологией, психофизикой). Целью
настоящего стандарта является определение соответствующих понятий,
способствующих дальнейшему расширению применения данных научных дисциплин в
вопросах безопасности машин и совершенствованию применения стандартов при
конструировании машин. Согласно ЕН 1070 [10] настоящий стандарт
относится к типу B. Положения этого стандарта могут быть дополнены и изменены
при разработке стандартов типа C. Примечание. Для машин, которые подпадают
под область применения стандарта типа C, положения стандартов типа C
предпочтительнее соответствующих положений стандартов типа B. 1. Область
применения Настоящий стандарт устанавливает термины
и определения, применяемые в ЕН 1005-2, ЕН 1005-3, ЕН 1005-4 и ЕН 1005-5. Основные понятия и общие эргономические
принципы конструирования машин даны в ЕН 292-1, ЕН 292-2 [1], ЕН 614-1 [6]. Настоящий стандарт применяется к машинам,
изготовленным после даты его введения. 2. Нормативные
ссылки В настоящем стандарте использованы
датированные и недатированные ссылки на европейские стандарты. При датированных
ссылках последующие редакции международных стандартов или изменения к ним
действительны для настоящего стандарта только после введения изменений к
настоящему стандарту или путем подготовки новой редакции настоящего стандарта.
При недатированных ссылках действительно последнее издание приведенного
стандарта (включая изменения). ЕН 292-1:1991. Безопасность машин.
Основные положения, общие принципы конструирования. Часть 1. Основные термины,
методология ЕН 1005-2. Безопасность машин. Физические
возможности человека. Часть 2. Составляющая ручного труда при работе с машинами
и механизмами ЕН 1005-3:2001. Безопасность машин.
Физические возможности человека. Часть 3. Рекомендуемые пределы усилий для
работы на машинах ЕН 1005-4. Безопасность машин. Физические
возможности человека. Часть 4. Положение тела при работе с машинами и
механизмами ЕН 1005-5. Безопасность машин. Физические
возможности человека. Часть 5. Оценка риска для кратковременных действий при
высокой частоте манипуляций. 3. Термины и
определения В настоящем стандарте применены термины
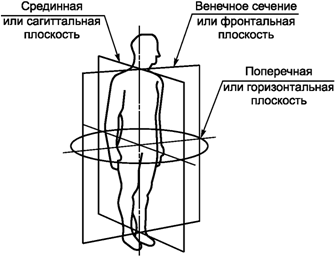
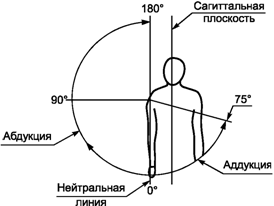
по ЕН 1070 [10], а также следующие термины с соответствующими определениями: 3.1. Абдукция: движение частей человеческого тела en abduction в направлении от сагиттальной (срединной) плоскости (см. рисунки 2 и 3).
Рисунок 2. Плоскости
Рисунок 3. Абдукция и аддукция 3.2. Действие: активация мускула(ов) во время en action деятельности при выполнении какого-либо процесса (в противоположность покою). 3.3. Период действия: длительность отдельного этапа en action периодического действия, охватывающего время покоя period и время движения. 3.4. Аддукция: движение частей человеческого тела en adduction в направлении к сагиттальной (срединной) плоскости (см. рисунки 2 и 3). 3.5. Угол асимметрии: угол, отображающий перемещение en angle of центра тяжести груза от исходной позиции в сагиттальной asymmetry плоскости до конечной позиции в плоскости асимметрии. Угол асимметрии измеряется как угол между линиями пересечения с горизонтальной плоскостью сагиттальной плоскости и плоскости асимметрии. Если в процессе подъема/опускания (груза) стопы ног изменяют положение, следует заново определить базовые плоскости (сагиттальную и асимметрии), соответствующие максимальному значению асимметричного поворота (см. рисунок 4).
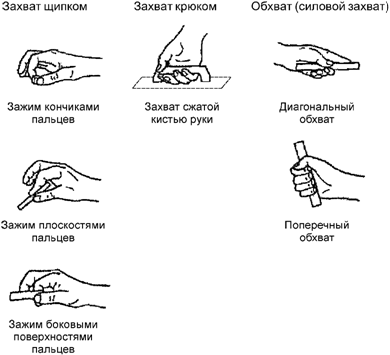
Рисунок 4. Угол асимметрии 3.6. Рабочий контингент: взрослое рабочее население, en general за исключением лиц, не пригодных к физической работе или working не достигших установленного законом минимального возраста population для привлечения к этой работе. 3.7. Захват предмета: способ, которым можно en grip of манипулировать предметом вручную (удерживать object и/или перемещать). Способ захвата, например захват пальцами, захват кистями рук, обхват (силовой захват), вид захвата и точка захвата, определяют в зависимости от характера рабочего задания и степени трудности манипулирования удерживаемым предметом. 3.7.1. Захват щипком: захват предмета между большим en pinch grip и одним (преимущественно указательным) или несколькими пальцами руки (см. рисунок 5).
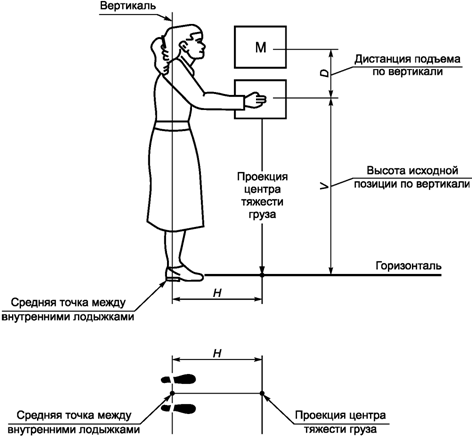
Рисунок 5. Способы захвата 3.7.2. Захват крюком: при захвате крюком большой палец en hook grip играет пассивную роль, а остальные - активную. Средний и последний суставы каждого пальца сгибаются вокруг ручки (см. рисунок 5). 3.7.3. Обхват, силовой захват: захват, при котором en power grip большой палец и остальные противостоят друг другу и окружают предмет таким образом, чтобы достичь максимального контакта с охватываемой поверхностью. Такой захват служит, главным образом, для выполнения повышенных усилий или для того, чтобы воспрепятствовать вращению предметов (см. рисунок 5). 3.8. Манипулирование вручную: любая деятельность, en manual которая требует использования силы человека для подъема, handling опускания, переноски или других действий по перемещению или торможению какого-то предмета. 3.8.1. Подъем и опускание вручную: подъем или опускание en manual предмета с помощью физической силы человека из исходного lifting положения вверх или вниз. 3.8.2. Переноска вручную: перемещение какого-либо en manual поднятого предмета с помощью физической силы человека. carrying 3.8.3. Позиция по горизонтали H: расстояние по en horizontal горизонтали между центром тяжести груза (средней точкой location между руками) и средней точкой между лодыжками обеих ног, измеренное в начале и в конце подъема (см. рисунок 6) (на рисунке 6 представлен частный случай, когда H в начале и конце подъема одинаково).
Рисунок 6. Горизонтальная и вертикальная позиции 3.8.4. Позиция по вертикали V: расстояние по вертикали en vertical между центром тяжести груза (средней точкой между руками) location до пола, измеренное в начале подъема (см. рисунок 6). 3.8.5. Дистанция подъема D: абсолютное значение разности en vertical между положением центра тяжести груза в начале и в конце displacement подъема по вертикали (см. рисунок 6). 3.8.6. Расчетная масса, кг: масса, рекомендуемая для en reference общей оценки риска с учетом предполагаемого исполнителя. mass 3.8.7. Фактическая масса, кг: масса объекта(ов), en actual mass которым(ми) манипулируют вручную. 3.9. Оператор: человек/люди, в задачи которого(ых) входят en operator установка, пуск в эксплуатацию, эксплуатация, наладка, поддержание в рабочем состоянии, чистка, ремонт или транспортировка машины [ЕН 292-1 (пункт 3.2)]. Термин "оператор" распространяется также на работников, осуществляющих монтаж и демонтаж машины. 3.10. Поза: положение тела или части(ей) тела человека. en posture 3.11. Время восстановления: период покоя после периода en recovery действия, в течение которого мускул(ы) отдыхает(ют). time 3.12. Покой: время рабочего процесса, в течение en rest которого не требуется специальной активации мускулов, относящейся к выполнению данной работы. 3.13. Общая оценка риска: наиболее полное определение en risk вероятности и степени тяжести возможного повреждения assessment или нанесения вреда здоровью в опасной ситуации с целью выбора подходящих мер безопасности (ЕН 292-1, пункт 3.8 и ЕН 1050 [8]). 3.14. Сагиттальная плоскость: срединная плоскость тела, en sagittal разделяющая тело продольно на правую и левую половины (см. рисунок 2). 3.15. Смена: отрезок времени в течение суток, en shift установленный для выполнения работниками возложенных на них обязанностей. Продолжительность смены в разных отраслях промышленности различна, но обычно устанавливается в пределах от 4 до 8 ч в каждом двадцатичетырехчасовом периоде. 3.16. Статическое положение тела: любое положение тела, en static которое сохраняется дольше 4 с. При этом уровень усилий, posture прилагаемых человеком, остается неизменным или меняется незначительно. 3.17. Вспомогательные технические средства: устройства en technical для сборки, транспортировки, ввода в эксплуатацию, aids эксплуатации и демонтажа машины. К ним принадлежат рукоятки, клинья, колеса, крючья, рычажные приспособления, ленточные транспортеры, краны, устройства напольного транспорта, подъемные столы и т.д. Они способствуют улучшению условий труда оператора, в том числе устраняют полностью или частично необходимость выполнения вручную подъема груза или других манипуляций, тем самым уменьшают нагрузку на тело человека. Алфавитный
указатель терминов на русском языке абдукция 3.1 аддукция 3.4 время восстановления 3.11 действия 3.2 дистанция подъема 3.8.5 захват крюком 3.7.2 захват предмета 3.7 захват силовой 3.7.3 захват щипком 3.7.1 контингент рабочий 3.6 манипулирование вручную 3.8 масса расчетная 3.8.6 масса фактическая 3.8.7 обхват 3.7.3 оператор 3.9 оценка риска общая 3.13 переноска вручную 3.8.2 период действия 3.3 плоскость сагиттальная 3.14 подъем и опускание вручную 3.8.1 поза 3.10 позиция по вертикали 3.8.4 позиция по горизонтали 3.8.3 покой 3.12 положение тела статическое 3.16 смена 3.15 средства вспомогательные технические 3.17 угол асимметрии 3.5 Алфавитный
указатель эквивалентов терминов на английском языке abduction
3.1 adduction
3.4 action
3.2 action period 3.3 actual mass
3.8.7 angle of asymmetry 3.5 general working population 3.6 grip of object 3.7 hook grip
3.7.2 horizontal location 3.8.3 manual carrying
3.8.2 manual handling 3.8 manual lifting
3.8.1 operator
3.9 pinch grip
3.7.1 posture
3.10 power grip
3.7.3 recovery time
3.11 reference mass 3.8.6 rest
3.12 risk assessment
3.13 sagittal
3.14 shift 3.15 static posture
3.16 technical aids
3.17 vertical displacement 3.8.5 vertical location 3.8.4 Приложение A (обязательное) СВЕДЕНИЯ О СООТВЕТСТВИИ НАЦИОНАЛЬНЫХ СТАНДАРТОВ РОССИЙСКОЙ ФЕДЕРАЦИИ ССЫЛОЧНЫМ ЕВРОПЕЙСКИМ СТАНДАРТАМ Таблица A.1
БИБЛИОГРАФИЯ [1] ЕН 292-2. Безопасность машин.
Основные положения, общие принципы конструирования. Часть 2. Технические
принципы и технические условия [2] ЕН 414. Безопасность машин. Правила
разработки и оформления стандартов по безопасности [3] ЕН 547-1. Безопасность машин.
Антропометрические данные. Часть 1. Принципы определения размеров проемов,
обеспечивающих доступ человека к машине [4] ЕН 547-2. Безопасность машин.
Антропометрические данные. Часть 2. Принципы определения размеров проемов для
отдельных частей тела человека [5] ЕН 547-3. Безопасность машин.
Антропометрические данные. Часть 3. Размеры тела человека [6] ЕН 614-1. Безопасность машин.
Эргономические принципы конструирования. Часть 1. Термины и общие положения [7] ЕН 894-3. Безопасность машин.
Эргономические требования по конструированию средств отображения информации и
органов управления. Часть 3. Исполнительные механизмы системы управления [8] ЕН 1050. Безопасность машин. Принципы
оценки и определения риска [9] ЕН ИСО 7250. Основные антропометрические
данные для технического проектирования [10] ЕН 1070. Безопасность машин.
Терминология [11] ЕН/ТО 26385. Эргономические принципы
в конструировании рабочих систем (ИСО 6385:1981) [12] 90/269/EWG. Директивы Совета от 29
мая 1991 г. о регламентах, относящихся к безопасности и защите здоровья при
манипуляциях грузами, которые представляют особую опасность для позвоночника
работающего (четвертая директива статьи 16, абзац 1 Директив Совета 89/391/EWG) [13] 89/391/EWG. Директивы Совета от 12
июня 1989 г. о проведении мер по улучшению безопасности и защите здоровья
работника во время работы [14] 89/656/EWG. Директивы Совета от 30
ноября 1989 г. о регламентах, относящихся к безопасности и защите здоровья
путем использования персонального защитного снаряжения для работника при
выполнении работы (третья директива статьи 16, абзац 1 Директив Совета
89/391/EWG) [15] 89/686/EWG. Директивы Совета от 21
декабря 1989 г. об уравнивании законодательных положений стран-членов по
персональному защитному снаряжению (изменено Директивой Совета 93/95/EW) [16] Научная документация, обосновывающая
пересмотр в 1991 г. уровня в сторону повышения: технические аннотации.
Национальный институт по профессиональной безопасности и здоровью, Цинциннати,
Огайо; май 1991; США, Департамент торговли, Национальная служба технической
информации, Спрингфилд, VA 22161 [17] Прикладное руководство по пересмотру
уровня в сторону повышения. США, Департамент здоровья и обслуживания человека.
Служба здоровья населения, Центр борьбы с болезнями и профилактики.
Национальный институт по профессиональной безопасности и здоровью, Цинциннати,
Огайо 45226; январь 1994 г. |
||||||||||||||||